はじめに
GPSといえば現在では一般によく知られた技術である。カーナビゲーションシステムや携帯電話を中心とした位置測定が有名である。新車のカーナビ装着率が30%を超えていることからも世間の認知度の高さがうかがえる。実際にはその他に、測量にも広く利用されている。事実2000年に起きた北海道有珠山の火山活動による地殻変動もこれを用いて正確に測定されている。また、高精度な地図作成にも利用されようとしている。人間が立ち入るのに困難な場所、危険な場所、また広範囲な地域を測量することができるので非常によく活用できる、新しい測量技術を確立しようとしている。
このように利用されているGPS技術だが、衛星からの信号を受け計測している、ということしか知らないことが多い。しかし、その精度を高めるためにあらゆる方法が試みられている。昔は100メートル単位の精度だったのが、2000年5月2日のSA解除を皮切りに、センチメートル単位での精度にまで上がってきている。我々は、日々精度を高めより多くの分野で利用されようとしているGPS技術についてまとめていきたいと思う。
GPSの基本技術
GPSとは、地球の上空を周る24個の衛星の位置を基準とし、地球上を三次元で検出する衛星測位方式である。GPSはアメリカが運用している衛星だが、その他にロシアのGLONASSがすでに運用されており、また日本ではMSAS、EUではGALILEOの運用が予定されている。
それでは、GPSの位置測定の仕組みについて簡単に説明しよう。
各GPS衛星は、Almanac Data とEphemeris Dataという二種類の軌道情報とGPS衛星に搭載された原子時計によるGPS時刻、電離層補正パラメータの計四つの情報を発信している。これらの情報から衛星から受信機までの信号到達時間を測定する。それに光速を掛けることで衛星・受信機間の距離(擬似距離)が求まる(この作業をレンジングと呼ぶ)。この作業を三機の衛星に対して行うと、三点交差法(図1)によって受信機の位置(二次元上で)が算出できる。
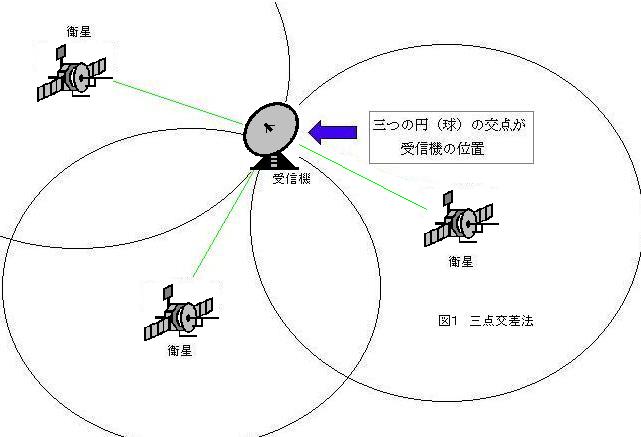
実際は四機の衛星を用いて高度を含めた三次元上の位置を測定できる。
基本的に位置測位は前文の方法が取られている。しかし、受信機側の操作によってGPSの測位方式には大きく二つの方式に分けられる。単独測位方式と相対測位方式である。
単独測位方式は受信機と四つの衛星だけを用いる。衛星から送られてくるコードを解析し、衛星が電波を発した時刻と受信機が電波を受信した時刻から衛星と受信機の距離を求め、加えて衛星の位置関係から受信機の位置を知る(図2)。つまり、前で述べたそのままの方法である。
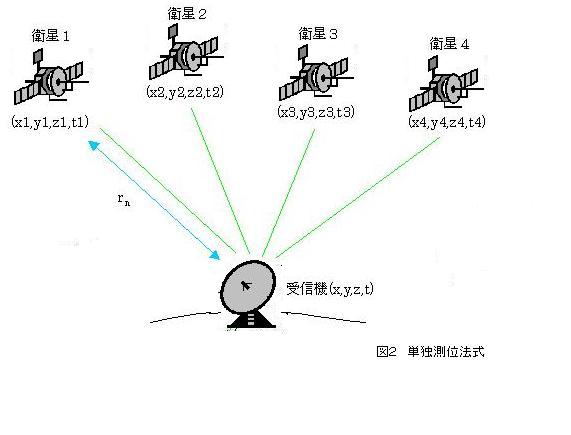
これは低コスト(受信機価格:数千円)で実現できるが精度が悪く20m程度である。
相対測位方式は基準点との相対測位により誤差を修正し精度を向上させるもので、現在D-GPSとRTK-GPSがある。RTK-GPSについては後に説明するので、ここではD-GPSについて説明する。
D-GPSとは、位置が正確にわかっている定点に基準局を設置する。そこから衛星までの距離は正確に求まるので、その地点で測距を行うと正確な距離と測定した距離の間に誤差が生じる。この誤差(擬似距離補正値)を利用者に知らせれば、利用者の単独測位方式と同様に求めた擬似距離に補正値として適用し、より正確な位置が測定できる。
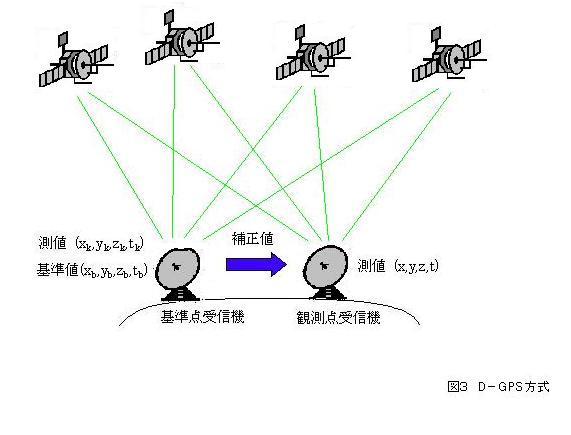
コストは受信機価格で数10万ほどかかるが、精度は50cm〜5mと高い。カーナビゲーションなどに良く用いられる。
このようにGPSは空間と時間の四次元のデータを用いて測量が行われる。ここでの最大の問題はいかにして測位誤差を小さいものにするかである。また、伝送路・伝送速度に関しても、効率よく、正確に情報を伝える方法が模索されている。それらの工夫として次節に幾つかの測位技術を提示する。
次世代GPS測位方式について
i. RTK−GPS
RTK−GPS(Real Time Kinematic GPS)とは、前述のD−GPSと同様に、基準点で誤差を求め、それを移動局(位置測定対象物)に知らせることで精度を上げる方式である。ただし、RTK−GPSでは衛星までの距離を測るのに、コード情報ではなく搬送波の数および位相(波の数)を用いることでcmオーダーの精度を実現する。
RTK−GPSはD−GPSなどに比べ高精度ではあるが、使用にあたって制約事項がある。それは、基準局受信機と移動局受信機との間にデータのやりとりが必要な為、その間に伝送装置を設けなければならないことである。また、基準局と移動局との距離(基線長)の問題もある。GPSの誤差要因としては、衛星からの電波信号の電離層と対流圏通過時の伝播遅延が挙げられる。これらはそのときの電離層や気象に依存するため基線長が短ければ両者の環境は非常に近しいものと考えられL1/L2の二重位相計算時に伝播誤差は相殺される。しかしこれが長ければ、条件が大きく異なる可能性があり、相殺結果が弱まり精度の劣化が起こる。つまり基準局と移動局との距離は短くなければならず、広範囲な利用が困難であるのだ。一般的には基線長は10km以内であることが必要といわれている。
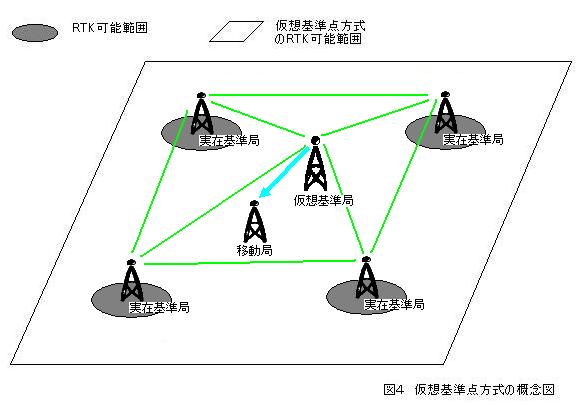
その問題を解決するために考えられているのが仮想基準点方式である。その目的は、現状RTKの限界とされている基線長を仮想的な基準局を生成して解決し、シームレスな高精度測位を可能とすることと、RTK補正情報プロバイダサービスの基本技術として取り込むことによって、既設のGPS基準局設備を活用できるようになり、利用者側での基準局設置の必要がなくなることである。
仮想基準点方式の原理は、複数の実在基準局で観測されたデータをもとに、基準局間における相対誤差モデルを生成する。この誤差モデルを基に、仮想的に決めた場所でのRTK受信機で観測されると推測できるデータを生成する方法である。つまるところ、周囲の観測データから、測位したい位置の誤差を推測しようというものである。
RTK−GPSの利用としては、海上の大規模施設(海上空港・埋め立て)、大規模建造物(橋・高層ビル)の建設などに利用されている。また、国土地理院が電子基準局(RTK−GPS)を全国約1000箇所に設置し日本列島の移動をmm単位で把握している。さらに、地図作成にも利用しようと考えており従来の測量にとって変わるものとして期待されている。
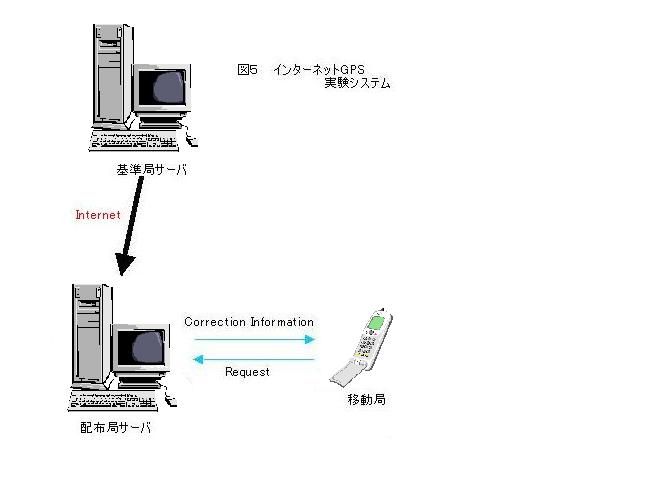
インターネットGPS
インターネットGPSとは、広域なD−GPSまたはRTK−GPSを想定した補正情報配信技術としてインターネットを利用する方法である。つまり基準局での擬似距離補正値をインターネットを通じて配布局へ転送する。配布局とは基準局からのデータを取捨選択して下流ノード(移動局または配布局)へ転送するシステムである。移動局は配布局と情報の要求やデータのやりとりをする。通信は専用のプロトコルを用いて行う。
インターネットGPSの特徴を幾つか述べておこう。
一点目は、汎用の移動局設備である。補正データの伝送するメディアを限定せず、インターネットと接続できる機器(携帯電話・PDA‥)ならどのような計算機でも利用できる。そのためGPS補正の専用のアンテナや無線機などを必要としない。
二点目は、サービスの細粒化である。双方向通信プロトコルを利用することにより、一つの基準局から複数のサービスを提供できる。移動局側がサービスの条件(補正の種類・利用可能衛星番号‥)を指定することにより、その要求にこたえることが可能となる。
三つ目は、低コストな基準局にある。補正データを配信する基準局も、広範囲をカバーする無線設備などを必要としなくなるため、大出力な無線局がいらない。
最後に、サービス範囲である。インターネットの接続できる地域ならどこでも補正情報を得ることが出来る。もちろん、移動局にあわせた基準局や補正データの選択が必要となる。
補正情報プロトコルにもふれておこう。プロトコルにはさまざまな情報を含めることが可能である。配布局では移動局から要求された方法で補正情報の配信を行う。例えば、補正前の位置情報や補正情報の種類などを含めることが可能である。サービスに合わせた情報が送ることが出来るのである。しかし、プロトコルは現在一つに統一されておらず、使う場所によって異なる時がある。今後、民間への広がりを考えるとプロトコルの標準化は急務といえる。
近年では仮想基準点方式をはじめ、複数の基準局からの情報を元に誤差情報の生成を行い、高精度・広範囲の補正を求める動きが一般的になっている。この場合、各地に点在する多数の基準局を繋ぎデータを収集する必要がある。リアルタイム性を必要とするGPSにおいて、日本全土にリアルタイム情報収集ネットワークの構築が必要不可欠となる。インターネットは、このようなシステムにおいて強力なツールとして利用できることは間違いない。
サーバ支援型位置情報システム
サーバ支援型測位システムとは、移動局と基地局の双方向のデータ通信機能を用い、サーバから移動局や基地局へ測位支援情報を提供する方式のことである。もう少し詳しくいうと、測位点の測位装置へ、サーバがネットワーク環境を使ってあらかじめ情報を送り込んでおき、測位時間の短縮、位置精度の向上、端末での低消費電力化をもたらすシステム体系全体を指すものとする。端的に言えば、移動局で位置を計算していたものを、サーバで行うというものである。
では実際にサーバと端末での操作を見てみよう。
まず、移動局から位置検出要求と概略位置(イニシャルポジション)をサーバへ送る。サーバではその情報を元に三角測量に適した位置にある衛星を探索し、その情報を移動体へ送る。そこで移動体では擬似距離の概算をし、サーバへ通知する。これでサーバでは移動局の位置を最終的に正確に計算し端末やアプリケーションに通知する。なお、移動局には通常、携帯電話等の移動網を使うので、近傍の基地局(アンテナ)をイニシャルポジションに用いることができる。また、基地局を基準局の機能として用いることでGPS衛星から信号が受信できなくとも精度が十分である通信範囲内であるなら測位を行うことが可能となる。
システムの特徴としては、GPS端末でのGPS信号受信が約1秒ほどであることや、端末側での計算量が少ないことから消費電力を極めて小さいものにできる。また、サーバ側で最終的な計算が行われるので第三者だけに位置情報を提供することもできる。
サーバ支援型には、ハイブリット構成測位というものがある。これはCDMAネットワークとGPSの補完的な性質を利用して地域に則した測位を行うものである。一般的に携帯端末機と基地局との電波の伝達時間を測るネットワークソリューションは、基地局の配置密度が高いほど精度が高くなる。そのため郊外や地方ではパフォーマンスからサービス提供できないことがある。しかし、GPSはこのような遮蔽物の無い開けた場所にこそ威力を発揮する。逆に都市部では遮蔽物が多く衛星を知覚できないこともあるが、基地局が密集しており、複数の基地局にアクセスできる。このネットワークとGPSの補完的な性質を活かし、両者を組み合わせることによって、位置情報の可用性、精度・感度、応答時間の向上を図ることができる。以下にその構成を図に示す。
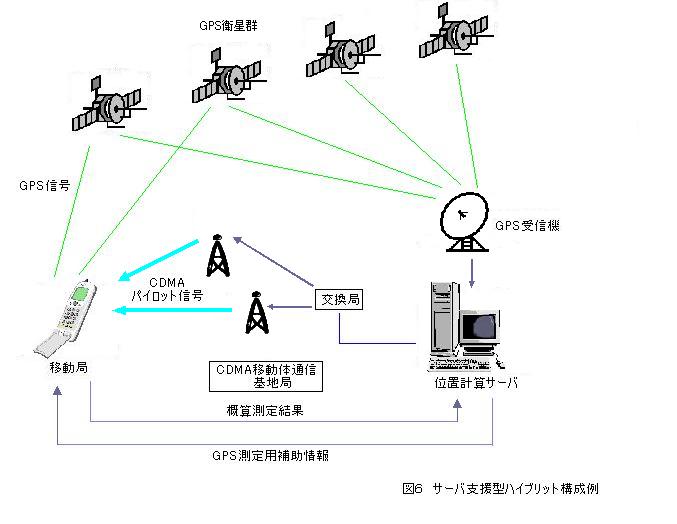
ハイブリット構成測位で使われているCDMAの測位方法にもふれておく。その手法はAFLT(Advanced Forward Link Trilateration)とよばれ、GPS時計と同期した複数の基地局からの電波到達時間を測定し、基地局の地理的状態から算出する方法である。
このようにサーバ支援型位置情報システムはさまざまな発展をとげている。例えば地下や建物の中にいたとしても高精度な位置情報を得られるようになってきた。また、現在普及しているこの手法のGPS携帯に見られるように、安価でサービスをうけられるようにもなってきている。今後、電子取引から、インターネット・カー、インターネットITSの研究に見られる総合化などへ発展していくことだろう。
シュードライト
シュードライトとは、GPS衛星と同様な信号を地上から送信する装置のことである。地上にGPS衛星と同機能の擬似衛星を置くことにより、GPS衛星の配置によって起こる精度の劣化、障害物により可視衛星数の減少に伴う精度の劣化を少なくし、安定した位置情報サービスを提供することを目的とする。このシュードライトを民間航空用に使用したものをエアポートシュードライトとよぶ。航空機がより精度良く着陸するには、地上・海上で必要とされるものよりさらに安定した精度が要求される。シュードライトはこの要求に寄与できると考えられる。
では、シュードライトの測位方式について説明しよう。基本的には一般のGPSと同様の方法である。あわせて4つ以上の衛星とシュードライトを使って行う。それぞれに擬似距離を計算し、誤差補正をする。そしてそれらを用いて最小二乗法で測位計算を行う。ただし、シュードライトを利用するにはGPS衛星とシュードライトの間に時刻誤差がないことが必須である。
シュードライトにはいくつか大きな問題がある。その一つがニアファー問題である。ニアファー問題とは、シュードライト送信アンテナに近づくにつれ、シュードライトの信号強度が強くなるためGPS信号が受信できなくなる問題である。この方法を解決する方法はいくつか考案されている。その中の一つの方法としてワイドバインドの使用について説明しておく。この方法は、民間で使われているC/Aコードのチップレートより高い周波数のチップレートを使用することにより、信号がより広いバンドに拡散する。これによりC/Aコードで使用されているバンド内にあるシュードライト信号が減少しニアファー問題が改善される。次にマルチパルスの問題がある。
マルチパルスとは、構造物による反射波のことである。これに関しては、シュードライトの設置を付近に構造物がない場所にしたり、地面からの電波の反射率を小さくするために、垂直偏波を採用している。 最後にバイアス問題もある。これは、送信電力が比較的大きいことから受信機入力信号が飽和してしまうため、擬似距離にバイアスが生じてしまう問題であると考えられている。受信機のダイナミックレンジを大きくする方法で改善されるとしている。
シュードライトは民間航空でエアポートシュードライトとして利用するために実験が行われている。実際に高精度な測位結果を得るに至っている。さらに、精度を高めるために先に述べた問題を改善し実用に耐えうるよう努力がなされている。ニアファー問題はすでに解決されたといってもよい。現在はマルチパルスの影響を小さくする方法や、バイアス問題の対処法が模索されている。いずれ空港でシュードライトのシステムが見られる日も遠く無いかもしれない。飛行機の離着陸の事故が減らせるようになれば幸いである。
おわりに
このようにGPSは実社会のなかで高い利用価値がある。日本でもH2ロケットの打ち上げに成功したこともあり独自の衛星を持つことも考えられる。ただGPS衛星も新世代に移行するにあたりその技術を高めている。その恩恵を大いに享受できるようなシステムの開発を急がなければならない。また、送信波コード等のグローバルスタンダートを構築し世界規模のプロジェクトとして進めてほしいと思う。
軍事利用を目的としてスタートしたGPSであるが、今後、社会・文化の発展に大きく貢献していくことを期待する。
参考文献 情報処理学会誌 2002 Vol.43 No8
用語
- SA (Selective Availability)
- GPSの時刻情報に意図的に揺らぎを与え、精度を劣化させる操作。GPSは米国が軍事利用していたため他国に軍事利用されないように意図したもの。2000年5月2日に解除された。
- Almanac Data
- GPSで利用可能な衛星概略軌道情報。一度取得すると一週間程度利用できる。測位に利用する衛星を決めるのに使用する。
- Ephemeris Data
- 衛星の観測データを収集し、解析して得られた衛星軌道情報。
- GPS時刻
- 1980年1月6日0時UTC(協定世界時刻)を基準とし、そこからの週の数と日曜0時UTCからの秒数である。なお、GPS時間補正パラメータと時刻同期パターンも送信しており、これにより衛星と受信機をナノ秒単位で同期させている。
- 電離層補正パラメータ
- 電離層における電波遅延の影響を計算するための情報。
- L1/L2
- 衛星のデータを発信するために、GPS衛星で利用されているLバンド周波数の電波。L1が1575.42MHz、L2が1227.60MHz。
- C/Aコード
- L1で送られてくる測距信号。一般に開放されている。